|
|

|

|

|
Sharp GP2D12
|
Teil 1/2/3/4
|
Bilder aus der Sicht des GP2D12 Sensors:
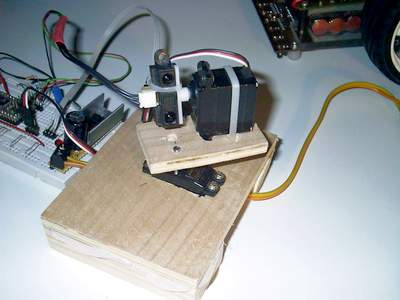
Aufgenommen mit einer simplen 2-Achs-Konstruktion
und als Windows Bitmap zum PC übertragen. Die Datei war ursprünglich 128 Pixel im Quadrat und wurde auf 128x96 gestaucht. Das Servo für die Y-Achse macht nämlich einen geringeren Bogen als das für die X-Achse. Hier wurde das Bild dann auf 400x300 Pixel vergrößert.
Der Sensor befindet sich ca. 7cm über Grund und das Objekt ist 10 cm hoch.
|
|
Fazit:
Interessant finde ich die Reflexionen an der Ecke zwischen Boden und Wand.
So erklären sich sicher einige Fehlmessungen.
Auch die Meßzeit müßte noch erhöht werden, weil der Sensor ca. 40 Millisekunden für das Bereitstellen des nächsten Meßwerts braucht.
Und natürlich läßt sich an der Mechanik noch einiges verbessern. So ein Servo macht nämlich nicht immer eine Bewegung wenn sich der Impuls nur wenig ändert. Abgesehen davon, daß es noch Getriebe- und Lagerspiel hat.
|
|
|